Vehículos aéreos autónomos
En esta línea se abordan temas de varias disciplinas como son: control de vehículos para el seguimiento de trayectorias en forma estable, modelado dinámico y estático de aviones y helicópteros no tripulados. Se lleva a cabo la experimentación para validar la teórica desarrollada en cada uno de los proyectos. Dependiendo de cada proyecto, es posible profundizar en temas tales como estudio aerodinámico, dinámica de vuelo, simuladores de vuelo, navegación de vehículos aéreos de larga duración (estudio energético), manipulación de objetos, mapeo 3D, modelado dinámico de avión y helicópteros, visión artificial, aterrizaje y despegue autónomo, sistemas multi agentes, sensores, filtrados, fusión de datos, simuladores de vuelos, sistemas inerciales de navegación, planeación de movimiento, vehículos híbridos y aspectos de seguridad.

Vehículos submarinos autónomos
En esta línea se trabaja en el modelado hidrodinámico, dinámica de fluidos, navegación submarina, localización acústica, procesamiento de señales, cooperación con varios mini submarinos, manejo de sensores, supervisión de estructuras acuáticas y submarinas, modelado de corrientes, entre otras aplicaciones.
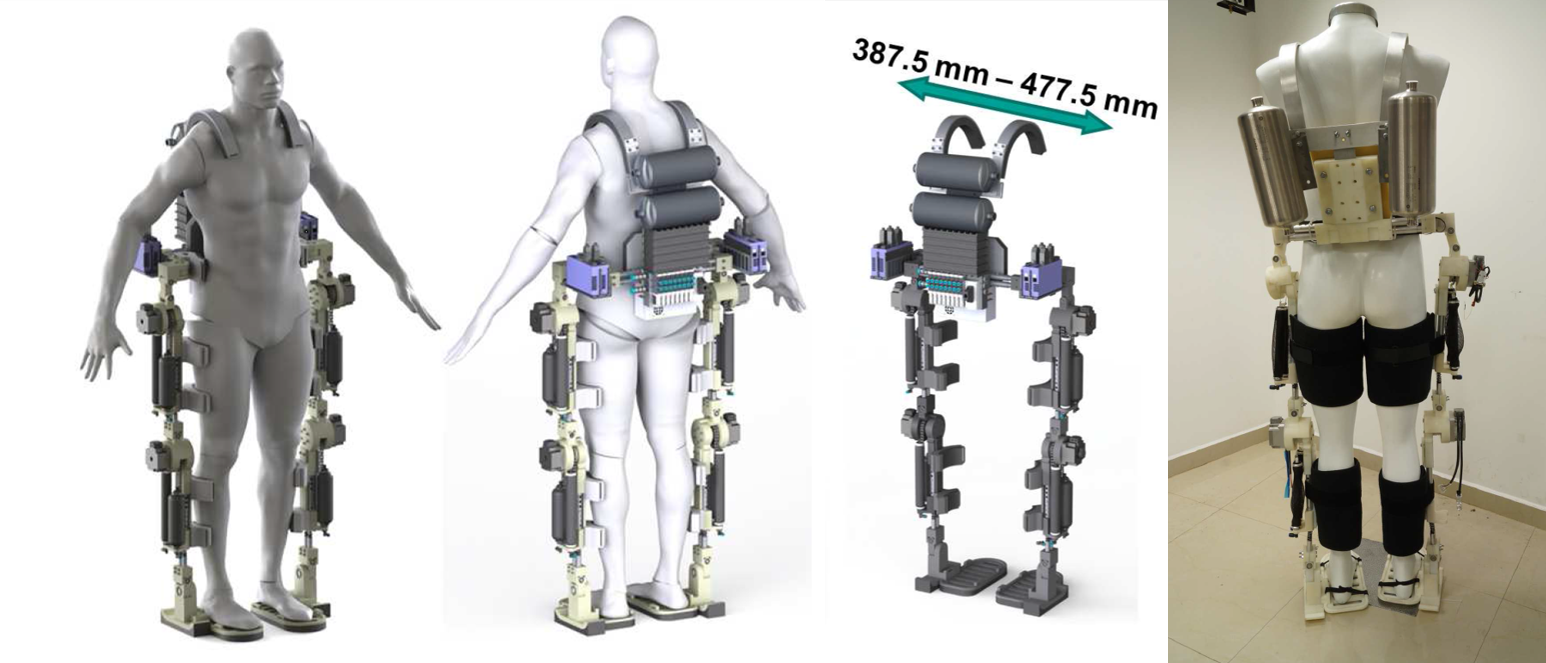
Exoesqueletos
En esta línea de investigación se abordan temas de robótica aplicada a la rehabilitación mediante una línea base de temas como el diseño mecánico, diseño gráfico, construcción, modelado dinámico, simulación y control de exoesqueletos. Teniendo como base estos temas se propone que en cada uno de los proyectos se complementen la teoría con el desarrollo de un prototipo enfocado en la rehabilitación del cuerpo humano por lo que además se debe considerar el estudio de la anatomía, mecánica y fuerzas del cuerpo humano. Los principales temas de investigación son: Sensores mecánicos de fuerza y electromiográficos para la interpretación de la intención humana, análisis de esfuerzos y fuerzas para diseño de exoesqueletos, aparatos de rehabilitación pasiva y activa para extremidades inferiores y superiores, exoesqueletos para asistencia de bipedestación y marcha, multiplicación de fuerza por medio de actuadores eléctricos lineales, multiplicación de fuerza por medio de actuadores neumáticos, aplicación de modelado y leyes de control de exoesqueletos.
Vehículos terrestres autónomos
En esta línea se abordan temas de varias disciplinas como son: control de vehículos para el seguimiento de trayectorias en forma estable, modelado dinámico y estático de vehículos terrestres.

En estas líneas de investigación están asociados los siguientes programas de posgrado: i) Por parte del CINVESTAV: Maestría y Doctorado en Sistemas Autónomos de Navegación Aérea y Submarina (SANAS), ambos aprobados por el PNPC (3170 y 5060) del CONACyT, ii) La maestría Ciencias en Automatización y Control de la Universidad Autónoma del Estado de Hidalgo en el PNPC (592) y iii) La maestría en Mecatrónica de la Universidad Politécnica de Pachuca en el PNPC (2005). El CINVESTAV está alineado al Programa Nacional de Desarrollo 2013-2018 en el aseguramiento de la calidad de la educación. Además, los planes de estudio de los posgrado que participan en el LaNaVEx coinciden con las siguientes estrategias del Plan Nacional: III.2 Desarrollo tecnológico para lograr una sociedad más justa y próspera. En este apartado se menciona que se requiere una independencia tecnológica en tecnologías emergentes. (Ver en Anexo_1 la carpeta Plan Nacional, pag.67) VI.1 (líneas de acción transversales Objetivo 1.6 ) Salvaguardar a la población, a sus bienes y a su entorno ante desastres de origen natural y humano.