An exoskeleton is an active mechanical device that isessentially anthropomorphic in nature since it is “worn” by an operator and fits closely to his or her body, and works in concert with the operator’s movements. In general, the term “exoskeleton” is used to describe a device that augments the performance of an able-bodied wearer. The term “active orthotics” is typically used to describe a device that is used to increase the ambulatory ability of a person suffering from leg pathology.
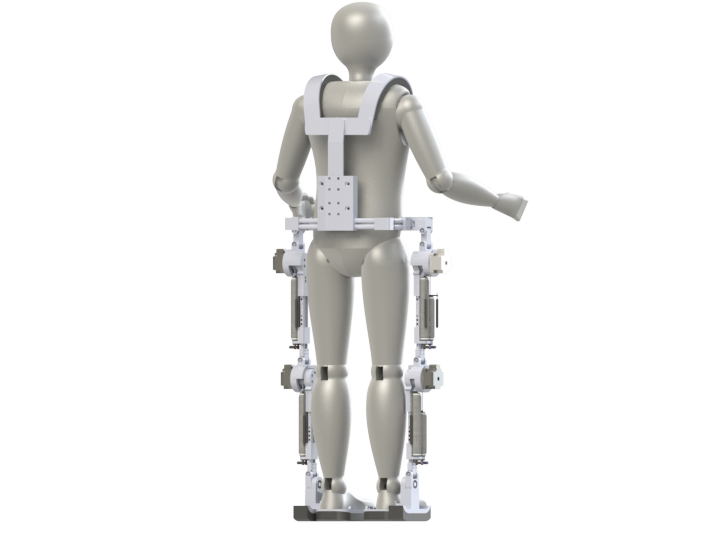
The objective of the project is to design and fabricate an exoskeleton for the “energy augmentation”. Energy augmented exoskeletons are designed to assist the wearer. It hasvarious applications in the industries, hospitals and laboratories for handling the heavy objects.
Different experiments may need to be conducted to verify the various control algorithms, sensors and actuators. One of such experiment was conducted for the verification and understanding of the force control algorithm. The experiment was successfully executed with satisfactory results.
For the next step in this process, we are designing a 2 Degrees of freedom (DOF) exoskeleton at “The Centre for Advanced Studies and Research of the National Polytechnic Institute” (CINVESTAV-IPN) of Mexico City.